
Desde a perspectiva da estrutura funcional, a execución do xerador de baleiro é principalmente a válvula de control electromagnética para controlar o xerador de baleiro para realizar a xeración de presión negativa e parar, para conseguir a función de atraer e soltar a peza de traballo.
Como resultado, o sistema xeralmente inclúe os seguintes compoñentes: 1. Fonte de aire comprimido;2. Filtro;3. Cambiar a válvula solenoide;4. Actuador de baleiro;5. Ventosa final, bolsa de aire, etc. (Na seguinte figura móstrase unha estrutura típica).
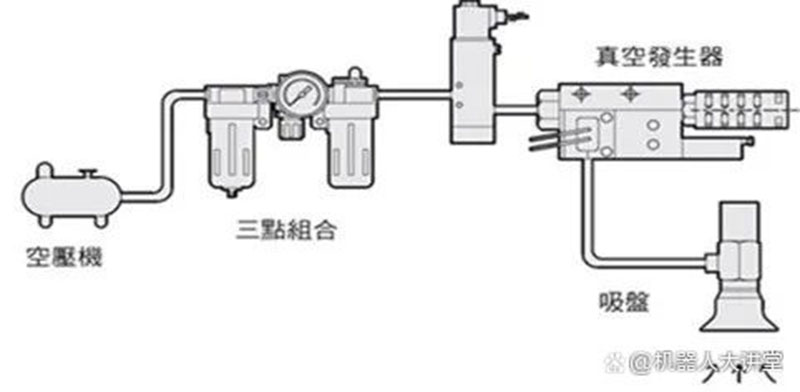
Ademais, baixo os requisitos da automatización industrial, para realizar o seguimento do proceso de adsorción ao baleiro, algúns fabricantes xeralmente engaden ao sistema compoñentes de control pneumático como medidores de fluxo, interruptores de detección de presión e interruptores de proximidade ao sistema.
Non obstante, dado que a maioría dos compoñentes son modificados polo integrador segundo as necesidades do cliente e as condicións de traballo no lugar, a complexidade de todo o sistema adoita ser alta.
Ao mesmo tempo, os fabricantes de múltiples compoñentes levan a complexos traballos de instalación e posta en servizo no lugar, e algúns deles teñen un alto consumo de enerxía e dependen ao 100% das fontes de gas.A integración parcial pode non ser posible
Evite a contaminación acústica, o que supón problemas inaceptables para ambientes de alta precisión e alta limpeza, como baterías de litio e semicondutores.
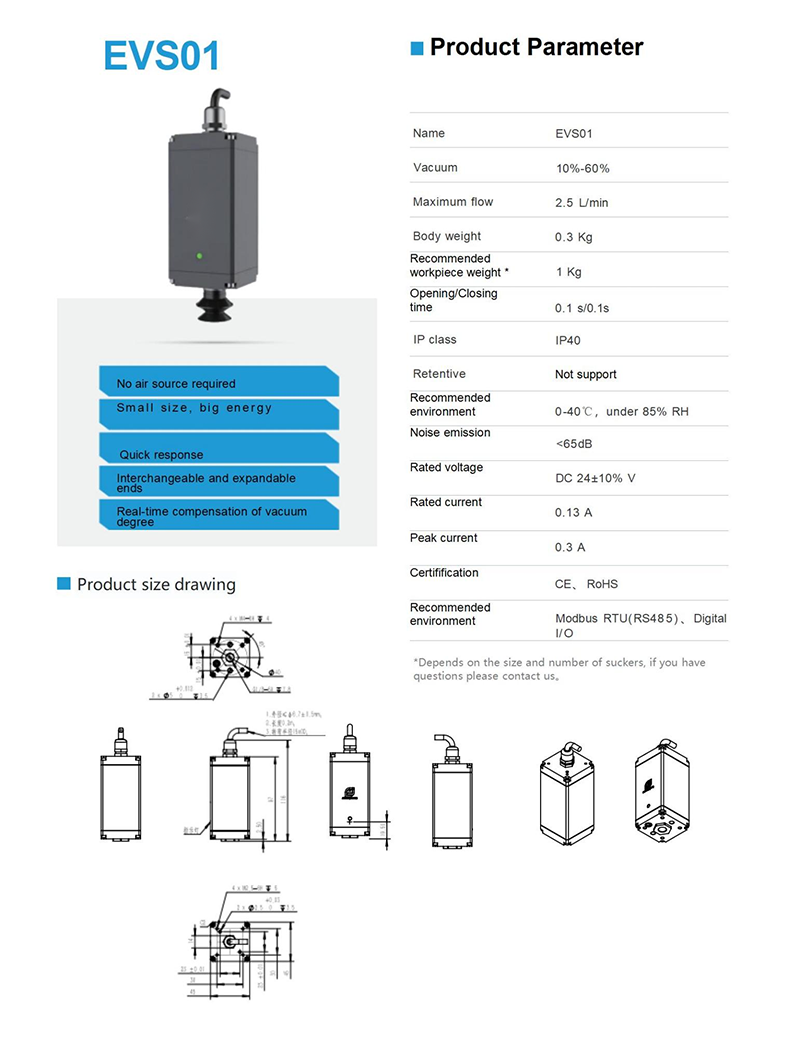
En xeral, EVS é unha nova xeración de actuadores de baleiro eléctricos intelixentes que non requiren unha fonte adicional de aire comprimido, o que sen dúbida chama a atención.
O maior beneficio do sistema de aforro de aire é a súa facilidade de instalación.Porque isto sen dúbida pode reducir moitos compoñentes auxiliares, incluídos compresores de aire, tanques de almacenamento de aire, equipos de purificación de aire e tubos de saída, etc., facendo que o cableado sexa máis fácil, cómodo e claro para o uso dos clientes.
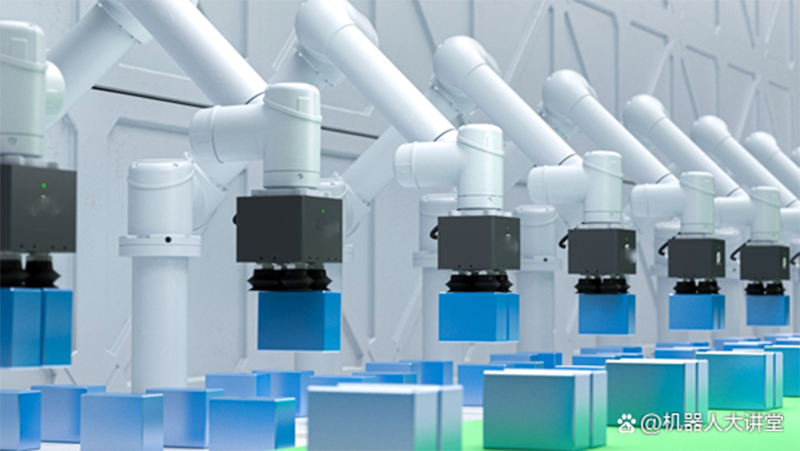
Infórmase de que, na actualidade, moitas escenas, incluíndo plataformas de robots móbiles, montaxe electrónica 3C, fabricación de baterías de litio, fabricación de semicondutores, loxística rápida, etc., teñen un deseño espacial relativamente compacto.
Batería cuadrada de succión EVS08
Máis detalles e vantaxes
A sala de conferencias do robot decatouse de que este produto, que parece moi pequeno e só pesa 2,5 kg, pode alcanzar un alto nivel de 10 kg.Debido ao deseño de baixa tensión de 24 V, o consumo de enerxía é do 20% do sistema pneumático tradicional, e a forza de adsorción ao final pódese configurar e axustar e a forza de adsorción pode alcanzar os 102-510N.
En termos de deseño estrutural, EVS adopta un deseño estrutural máis compacto e lixeiro, o que fai que EVS sexa un 30% máis pequeno que a aerodinámica tradicional para o mesmo peso de carga.
Ao mesmo tempo, pódese conectar directamente ao conector do extremo do brazo robótico, o que reduce os compoñentes auxiliares redundantes, faino máis flexible de usar, pódese despregar rapidamente e absorber facilmente varios obxectos grandes, especialmente axeitado para empilhado, manipulación e outras operacións de escena.
Para mellorar a comodidade de uso, o actuador de baleiro eléctrico tamén ten unha interface integrada, que se pode usar para controlar e supervisar todo o proceso de adsorción de obxectos.
Infórmase de que isto é para comodidade dos clientes para controlar o grao de baleiro do actuador de baleiro mediante instrucións e tamén conectarse a través da ligazón IO para o seguimento e o mantemento preditivo do proceso de adsorción.A supervisión do estado reducirá os erros e o tempo de inactividade e garantirá a dispoñibilidade do sistema.
Sobre esta base, as vantaxes e características do SVE tamén se reflicten nos seguintes puntos:
1. Estrutura compacta e peso lixeiro: EVS é un 30% máis pequeno que o tamaño pneumático tradicional ao absorber o mesmo peso de carga.Pódese conectar co conector ao final do brazo mecánico para realizar a absorción da carga, especialmente axeitado para empilhado, manipulación e outras operacións de escena;
2. Abundante configuración de terminal: pódense configurar varios tipos de ventosas, airbags e outros compoñentes para realizar o agarre de diferentes obxectos, incluíndo compoñentes cadrados, esféricos e de forma especial;
3. As canles duais pódense controlar de forma independente: controla facilmente os lados esquerdo e dereito do actuador de baleiro e os dous lados son independentes entre si, mellorando aínda máis a eficiencia de traballo da liña de produción.Realiza succión e colocación ao mesmo tempo, o que facilita moito a manipulación e clasificación de obxectos, aforrando espazo e tempo;
4. Aspiración axustable: o grao de baleiro pódese axustar segundo as características do produto aspirado e pódese realizar a compensación do baleiro en tempo real;
5. Retroalimentación de estado: ten un sensor de retroalimentación de baleiro, que pode detectar o estado de adsorción dos obxectos en tempo real e proporcionar feedback e alarma;
6. Protección de apagado: despois do apagado, pode realizar o autobloqueo de apagado por adsorción para protexer os obxectos adsorbidos;
7. Forte adaptabilidade: admite o protocolo de comunicación 24V I/O e MODBUS RTU (RS485);
8. Fácil de instalar e depurar: o protocolo de comunicación é sinxelo e lexible, o que reduce moito a dificultade de depuración.Ademais, o software de depuración do ordenador anfitrión pódese achegar como agasallo, que se pode configurar e editar para configurar os parámetros das funcións fóra de liña.
Conclusión e futuro
Baixo a tendencia da automatización e a intelixencia, os actuadores de baleiro eléctricos convertéronse cada vez máis nun compoñente clave para garantir o funcionamento normal dos robots e sistemas de automatización, facendo que o uso de sistemas de actuadores eléctricos sexa máis cómodo e fácil de usar, e poden satisfacer escenarios máis diversificados como robots compostos móbiles..
A interface integrada e a rica configuración do terminal e outras optimizacións poden mellorar aínda máis a fiabilidade dos compoñentes clave do robot, reducir as paradas de produción e os problemas de implantación remota para os usuarios finais e reducir aínda máis os custos de mantemento e posvenda.
Hora de publicación: 19-Abr-2023